












تصور کنید که در یک مسیر کوهستانی دور افتاده مجروح شدهاید، اما توانستهاید با امداد اضطراری تماس بگیرید. اگر این تحقیقات تیم ایتالیایی به نتیجه برسد، اولین کسی که به صحنه میرسد میتواند یک ربات انساننمای کوچک با یک جت پک باشد!
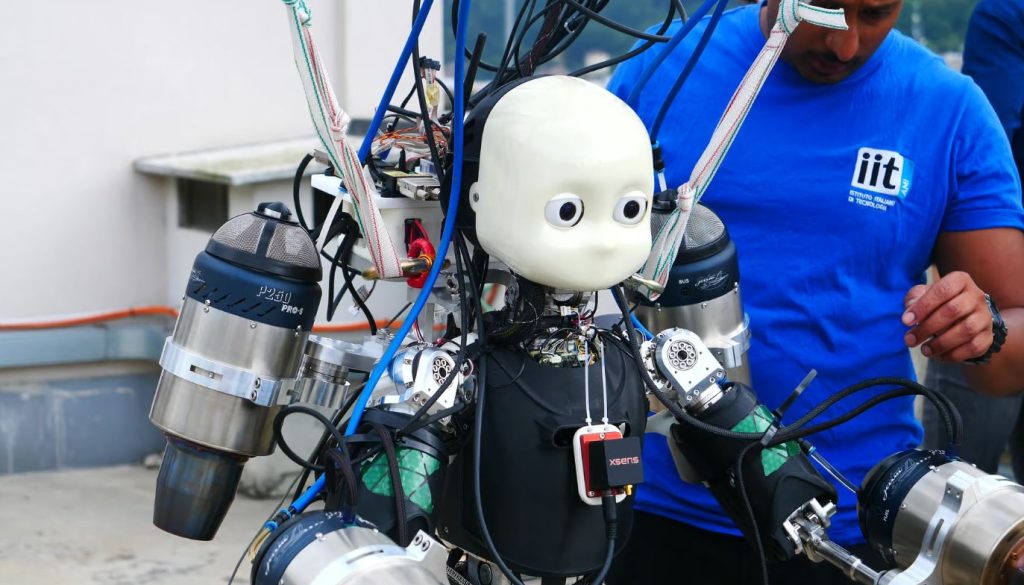
این پروژه از سوی گروه هوش مصنوعی و مکانیکی در موسسه فناوری ایتالیا (Istituto Italiano di Tecnologia) بهصورت یک ربات دوپا شبیه به کودک برای تحقیقات هوش مصنوعی با نام iCub طراحی شده و هدف آن این است که با استفاده از نیروی جت از زمین بلند شود.

این تیم تحقیقاتی علاوه بر بستن یک بسته جت دوقلو به پشت، دستهای انسانمانند و منعطف ربات اصلی را نیز برای دو جت پک دیگر قربانی کرده است. محققان میگویند حداکثر نیروی رانش این ربات 1000 نیوتن (حدود 225 پوند فوت) بوده و دمای اگزوز میتواند تا 800 درجه سانتی گراد (1472 درجه فارنهایت) برسد.
iRonCub3 با الهام از شخصیت تونی استارک با یک ستون تیتانیومی جدید ساخته شده است تا به آن کمک کند با ضربههای ناگهانی مقابله کرده و به جای یک لباس بیرونی بد بو در نمونه اولیه قبلی، روکشهای مقاوم در برابر حرارت بر روی آن اعمال شده است. همچنین تجهیزات الکترونیکی جدیدی به این ربات افزوده شده، جت پکها اکنون شامل حسگرهای نیروی گشتاور هستن و اجزای اضافی قبلی نیز حذف شدهاند تا راه را برای رسیدن این سیستم بهروزشده باز کنند.
همانطور که در ویدیوی بالا مشاهده می کنید، این پروژه هنوز در مراحل اولیه توسعه است، اما این تیم قبلاً یکی از رباتهای انساننمای خود را که به نیروی جت مجهز بوده در یک تونل باد آزمایش کردهاند تا شبیهسازیهای انجام شده را تأیید کنند. اما حتی اگر جتها چندین بار روشن شده باشند، iRonCub3 هنوز واقعاً از زمین بلند نشده است! با این حال، محققان میگویند که از پرواز آن در آینده نزدیک مطئن هستند.
الگوریتمهای کنترل پرواز توسط گروهی دیگر توسعه و تحلیل داده شدهاند و یک برنامهریز مسیر در شبیهسازیها اعتبارسنجی شده است. این تیم در حال حاضر روی “تخمین موقعیت و جهتگیری ربات در فضا” با استفاده از دادههای واحد اندازهگیری اینرسی و دوربین عمق سنج واقعی Real Sense کار میکند.
محققان خاطرنشان کردند:
پیچیدگی این محور تحقیقاتی با چالشهای کلاسیک رباتیک انساننما بسیار متفاوت است. ترمودینامیک نقش محوری در این ربات ایفا میکند، زیرا گاز منتشرشده از توربین دمایی در حدود 800 درجه سانتیگراد داشته و تقریباً با سرعت صوت حرکت میکند. آیرودینامیک این سیستم چند بخشی نیز به شبکههای عصبی با اجزای فیزیکی نیاز دارد تا به صورت آنلاین ارزیابی شوند. علاوه بر تمام اینها، تنظیمات کنترلکننده نیاز به ترکیب محرکهایی با پهنای باند کم و زیاد دارند و مانند اتصالات و توربینها باید نه تنها دینامیک موتور، بلکه مسیرهای توربین را نیز ایجاد کنند. تایید شدن در آزمایشها هرچقدر که جدی باشد، به همان اندازه خطرناک نیز هست و این جایی برای نظرات ناگهانی نمیگذارد.

هدف نهایی این است که انساننماهایی داشته باشیم که میتوانند برای انجام بازرسیهای هوایی به مکانهای اضطراری/فاجعه پرواز کنند یا دادههای کلیدی را از راه دور به پرسنل ارائه دهند. ما میخواهیم این ربات همچنین بتواند فرود بیاید و راه برود، از روی موانع حرکت کند، از پله ها بالا برود، درها را باز کند و … . همانطور که قبلاً پیشنهاد شد، این میتواند برای نجاتهای اولیه در صحنه و همچنین برای بازرسی ساختمانها یا زیرساختهای خطرناک مفید باشد.
منبع: Newatlas














