







![آپدیت HyperOS 3 باعث از کار افتادن گوشیهای شیائومی با رام جعلی میشود [راه حل رفع مشکل]](https://aero-tech.ir/wp-content/uploads/2026/01/9513-1-HyperOS-3-Update.jpg)




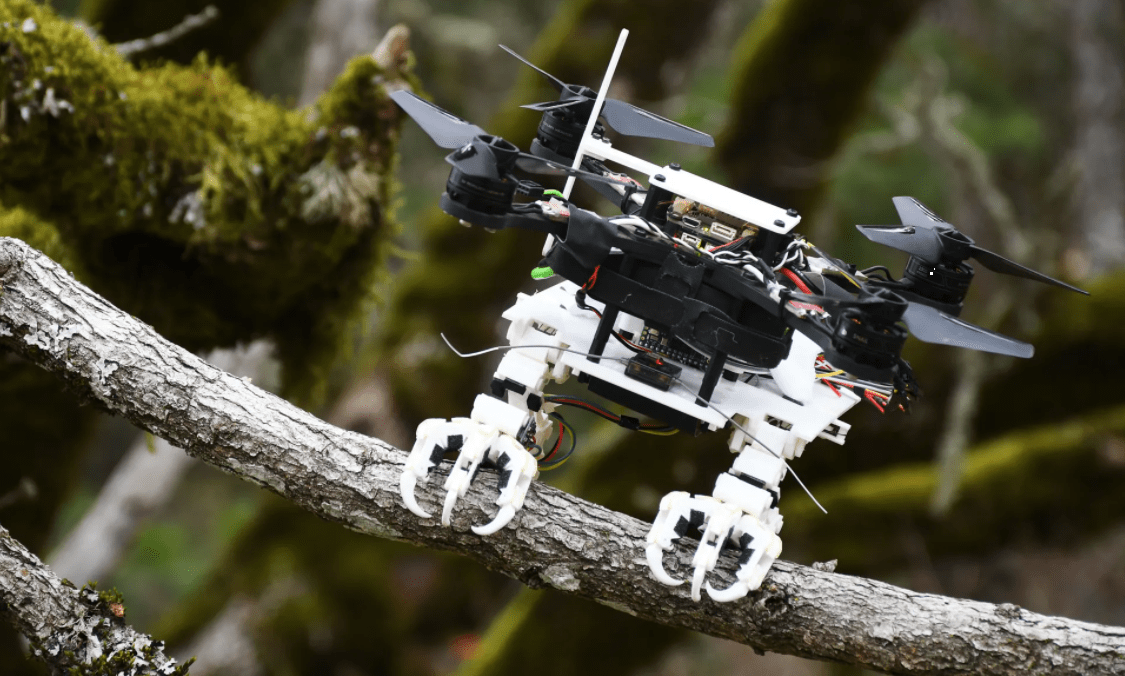
محققان، رباتی پنجهدار به نام SNAG را طراحی کردهاند که میتواند بر روی شاخهها بنشیند و اجسامی مانند توپهای تنیس را نیز در چنگال خود بگیرد.
طبق توضیحات نشریه Science، اسنگ (SNAG – چنگک هوایی الهامگرفته از طبیعت)، بر اساس پاهای یک شاهین طراحی و ساخته شده است. ساختارهای چاپشده با پرینتر سه بعدی، شکل استخوانها را شبیهسازی کرده و موتورها و همچنین سیمهایی که از نخ ماهیگیری ساخته شده، مانند عضلات و تاندونهای پرنده عمل میکنند. هریک از پاهای این ربات به یک موتور برای حرکت به جلو و عقب و موتور دوم جهت گرفتن و تصاحب اشیا، مجهز شده است.
یک مکانیزم تاندونمانند در پاها، انرژی حاصل از برخورد با شاخه را به نیروی چنگزدن تبدیل کرده و در مدت زمان 20 میلیثانیه، برای تصاحب هدف مورد نظر اقدام میکند. هنگامیکه پنجههای ربات روی شاخه قفل میشوند، یک شتابدهنده عملیات فرود را تایید کرده و الگوریتم متعادلکننده را برای تثبیت ربات در موقعیت خود، اعمال میکند.
ویلیام رودریک، دانشجوی آزمایشگاه مهندسان مارک کوتکوسکی و دیوید لنتینک، میگوید:
شبیهسازی نحوه پرواز و نشستن پرندگان آسان نیست. این در حالی است که پس از میلیونها سال تکامل، برخاستن و فرود آنها، حتی در میان شاخهها و درختانی مختلفی که در جنگل میبینید، بسیار آسان به نظر میرسد!
محققان، SNAG را به یک هواپیمای بدون سرنشین کوادکوپتر متصل کردند تا این موضوع را آزمایش کنند که چگونه چنگالها میتواند اشیا را گرفته، حمل کرده و همچنین روی سطوح مختلف قرار بگیرند. در کش و قوس کووید-19، رودریک، تجهیزات کار را از آزمایشگاه لنتنیک در استنفورد به روستایی در اورگان منتقل و در آنجا یک آزمایشگاه زیر زمینی را برای آزمایشهایی کنترلشده، راهاندازی کرد. او SNAG را در امتداد یک سیستم ریلی در سرعتها و سطوح متفاوت پرتاب کرد تا عملکرد آن را در سناریوهای مختلف ارزیابی کند. رودریک همچنین توانایی این ربات در گرفتن اشیا پرتابشده با دست، از جمله یک آدمک طعمه، یک کیسه لوبیای کوچک و یک توپ تنیس را مورد آزمایش و تایید قرار داده است.
این تحقیقات توسط دفتر تحقیقات علمی نیروی هوایی و بنیاد ملی علوم، تامین مالی شده است. برخی از کاربردهای بالقوه این ربات بیومیمتیک، شامل عملیات جستجو، نجات و نظارت بر حیات وحش محسوب میشود. این ربات، احتمالاً میتواند به پرندگان در زیستگاه طبیعی آنها نزدیک شود و روشهای جدید تحقیق را امکانپذیر کند!
رودریک که هر دو والدینش زیستشناس هستند، اضافه میکند:
بخشی از انگیزه اصلی این کار، ایجاد ابزارهایی بود که بتوانیم از آنها برای مطالعه جهان واقعی استفاده کنیم. اگر رباتی داشته باشیم که بتواند مانند یک پرنده عمل کند، دریچههای جدیدی برای مطالعه محیطزیست گشوده خواهد شد.
منبع: Eurekamagazine






![آپدیت HyperOS 3 باعث از کار افتادن گوشیهای شیائومی با رام جعلی میشود [راه حل رفع مشکل]](https://aero-tech.ir/wp-content/uploads/2026/01/9513-1-HyperOS-3-Update-300x203.jpg)

![نمایش جلوههای بصری خیرهکننده از دشتهای ژاپن در بازی فورزا هورایزن ۶! [تماشا کنید]](https://aero-tech.ir/wp-content/uploads/2026/02/9598-1-Forza-Horizon-6-scaled.jpg)






